
Повтор четырнадцатого старта РП-17Б был «разукрашен» зеркальцем под 45 градусов напротив видеокамеры… Цель полета: проверить действие передатчика телеметрии на большей высоте и посмотреть видеозапись полета с другого ракурса.
В старте использовал второй (из имеющихся) бессопловых двигателей — с длиной трубы 160 мм (БПДП20-150). Метод изготовления канала — такой же как в предыдущем старте (пластиковая трубка на стержне). Длина канала — 150 мм, диаметр 7 мм. Диаметр по топливу 20,4 мм. На фото — слева.
Полная масса двигателя с «надставкой» до общей длины 210 мм составила 108 грамм. Масса топлива — 78 грамм. Трубка двигателя летала уже более 10 раз.
Интереснее было с камерой. Обычная установка SQ8 в головной части ракеты дополнена зеркальцем 12х20 мм, закрепленным под углом 45 градусов «снаружи» ракеты (на фото видно картонный «обтекатель» зеркала).
 |
 |
Такая «доработка» позволила сделать кадр вдоль корпуса ракеты, что позволяет увидеть удаляющуюся землю и «выхлоп» ракеты.
Радиооборудование — такое же как в предыдущем старте: Arduino, датчик давления ВМР280, передатчик nRF24L01+, пищалка, транзисторный ключ управления «электропетардой» системы спасения; питание — 18650 аккумулятор.
 |
 |
На земле — ретранслятор, который принимает данные с nRF24 ракеты и по Bluetooth передает их на смартфон, где в терминальной программе видно текстовые сообщения о текущем давлении.
31 марта 2019 года. Солнечное раннее утро. Погода идеальная. После прохладной ночи остатки снега не подтаяли — можно передвигаться без лыж.
 |
 |
Ракета на старте. И фото двигателя с запалом…
Полная видеозапись полета
Сокращенная (замедленная) запись
Все прошло как задумывалось. Хороший старт
… уход с направляющей…
… ровный подъем.
Наверху ракета развернулась и пошла к земле. Сработала система спасения, однако стропы запутались и парашют не наполнился — падение было довольно стремительным.
 |
 |
Ракета пробила наст (примерно 5 см сжатого снега/льда потом вытащил) и вошла в землю (еще 5 см — комок земли с травой).
Но, все цело, электроника работает, «пищалку» — слышно.
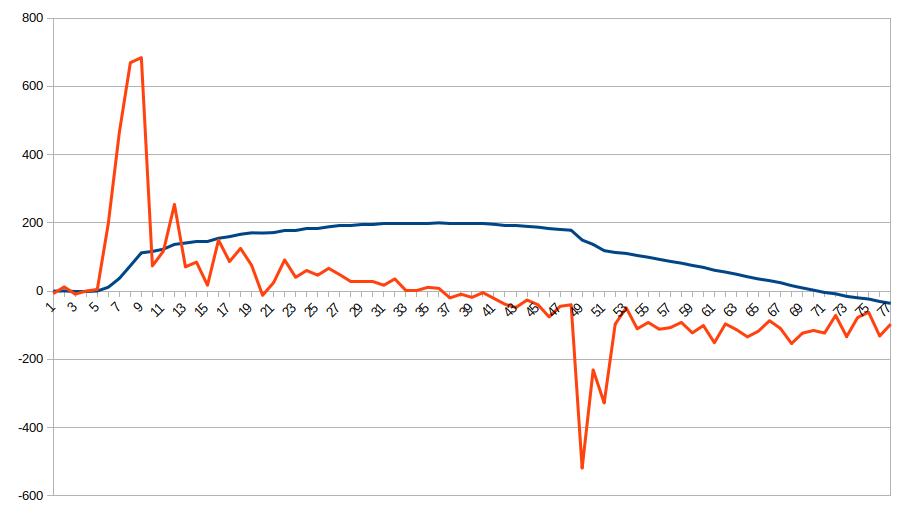
Данные полета переданные «по радио». Видно, что поток данных обрывается при касании ракеты земли. На самом деле передатчик продолжает работать, но снег не дает хорошего канала — ретранслятор не слышит ракету. На высоте примерно 180 м выпал один отсчет на взлете.
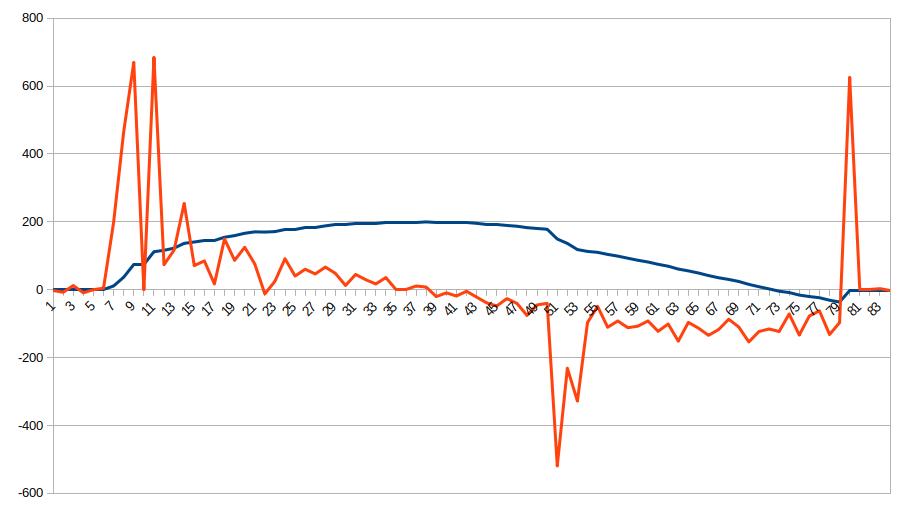
Тот же график, по данным из EEPROM Arduino. Здесь можно найти объяснение скачку высоты на спуске: ракета шла к земле открытым «носом» вниз — давление набегающего воздуха дало «скачок высоты»; после «приземления» — давление стало обычным.
Высота — 200 метров. Максимальная скорость — 650 км/час.
Видно резкое западание скорости в момент окончания работы двигателя. Скорей всего тут сказался «выступ» обтекателя зеркала.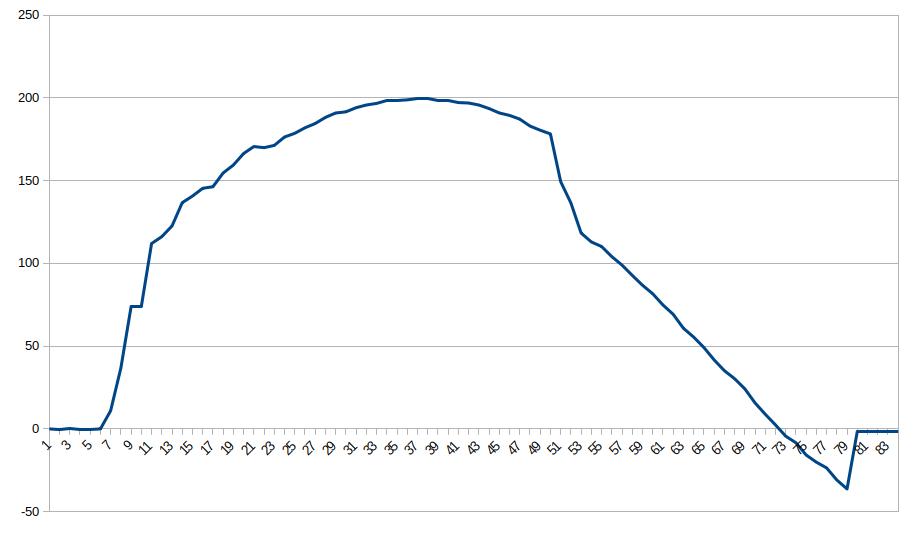
(на всех графиках отсчеты времени с периодом 200 мс, синим показана высота в метрах, красным — скорость в км/час)
А что же с новым ракурсом съемки бортовой камеры?
 |
 |
В общем-то, не так уж и зрелищно! Зеркало перевернуло картинку (на самом деле я стоял с другой стороны). Почему-то запись какая-то получилась затемненная, хотя было яркое солнце.
 |
 |
Интересный момент разделения ракеты — слишком быстрый — почти ничего не видно.
Вывод: такой ракурс хорош, но надо взлетать повыше. И зеркальце делать меньшим…