
В плане подготовки к «высоким» полетам, очередной старт РП-17Б отличался двумя пунктами…
Во-первых, немного изменена технология изготовления канала в бессопловом двигателе.
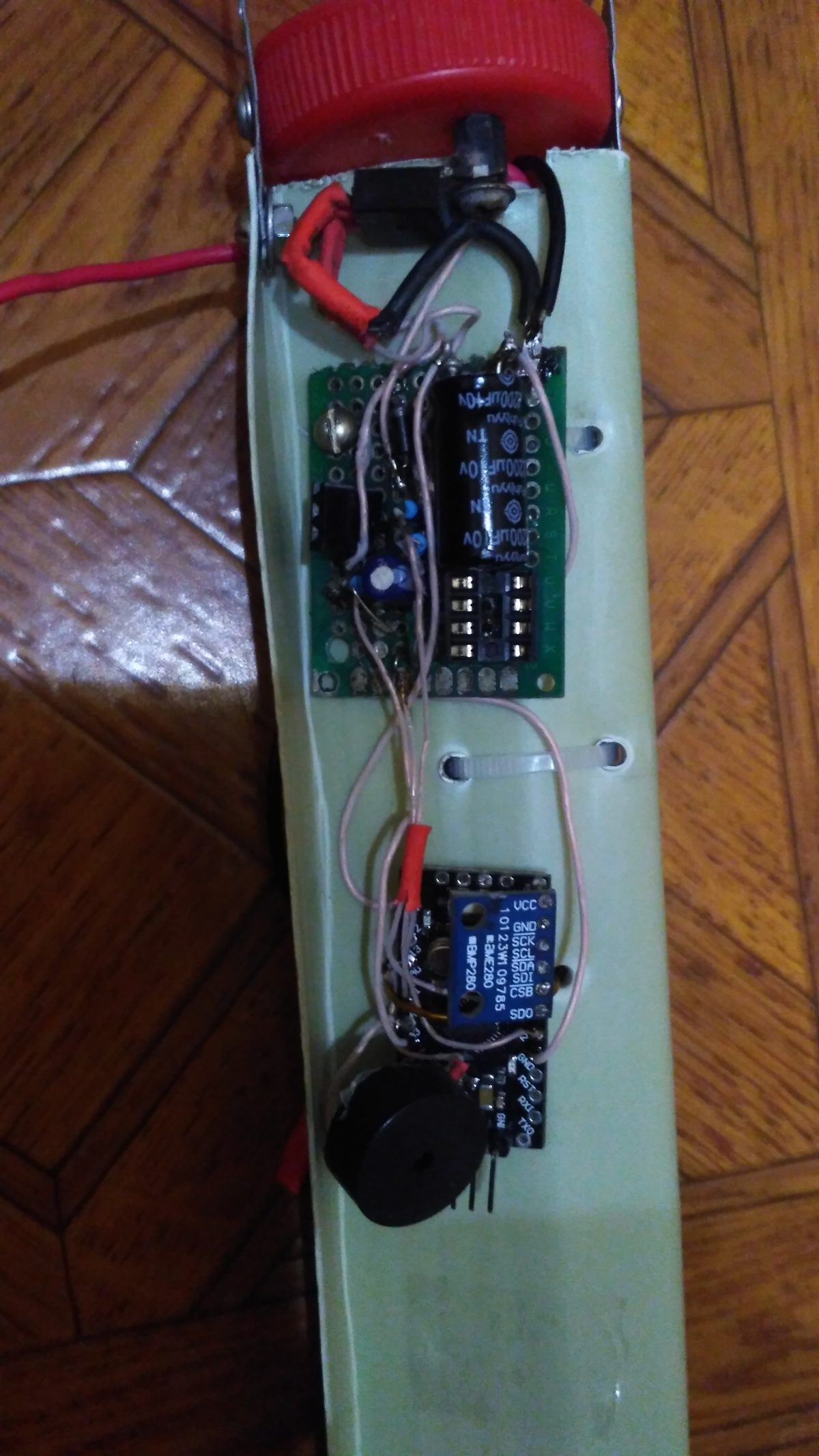
Во-вторых, на борту размещен передатчик (nRF24L01+) для передачи сведений о высоте в реальном времени.
Внешне РП-17Б к очередному старту не поменялась: тот же шарик в качестве обтекателя, такая же схема управления системой спасения.
 |
 |
 |
Небольшое отклонение — сопротивление нихромовой спирали в системе вышибного заряда несколько увеличилось (до 1,4 Ом, ранее был 1,0 Ом). Забегая вперед, надо сказать, что это сказалось на времени срабатывания — парашют раскрылся позднее ожидаемого. Аккумулятор перед стартом был заряжен.
Итак, двигатель: при изготовлении бессопловых двигателей стал регулярно проявляться «дефект». При вытаскивании стержня из «застывшего» двигателя, он с большим трудом выходил. При этом весь скотч сминался в конце шпильки. Изготовление двигателей практически стало невозможным.
Перебрал оснастку. Вместо газеты, при намотке на стержень, использовал пластиковую трубку (осталась целая после использования балона монтажной пены). Для этого сначала резьба шпильки обматывается слоем скотча (чтоб из трубки можно было легко вынуть шпильку). Трубку пришлось разрезать вдоль. Поверх трубки также наматывается слой скотча. При этом диаметр канала становится больше «газетного» варианта. Вынимается пластиковая трубка из готового двигателя также двумя спицами.
В четырнадцатом старте полетел «малый» вариант двигателя (расчетная высота 100 метров). Длина трубы 120 мм, длина канала 110 мм, диаметр канала 7 мм. Диаметр по топливу 20,4 мм (внутренний диаметр 25 миллиметровой трубы PN10). Масса топлива в БПДП20-110 составила 61 грамм. Полная масса двигателя (с надставкой до полной длины 210 мм) — 91 грамм.
Второй пункт программы — передача «телеметрии» в реальном времени. На сей раз вместо 433МГц был использован диапазон 2,4ГГц. В качестве приемопередатчиков использованы nRF24L01+. Ранее «на земле» изучил их дальнобойные качества и был весьма невысокого мнения о затее.
Общая идея выглядела так: после записи очередного отсчета в EEPROM, по радиоканалу с ракеты отсылается посылка из четырех двухбайтовых чисел. Первое слово — порядковый номер посылки (удобно отслеживать пропадания сигнала). Второе — адрес EEPROM, куда прошла очередная запись отсчета. Третье — адрес RAM и сведения о состоянии ракеты (отмечен старт, прошло срабатывание системы спасения, полет завершен). Четвертое слово — это, собственно, значение давления. Посылка принимается ретранслятором и по Bluetooth отправляется в терминальную программу на смартфон. На экране телефона видно принимаемые данные, их можно сохранить в виде текстового файла для последующего анализа.
Фрагмент принимаемого — тут обнаружение старта и начало перезаписи данных из оперативной памяти в EEPROM:
N;433; EEP;18; SRP+RAM;18; DAT;20636;
N;434; EEP;18; SRP+RAM;18; DAT;20543;
N;435; EEP;38; SRP+RAM;10016; DAT;20439;
N;436; EEP;40; SRP+RAM;10014; DAT;20339;
N;437; EEP;42; SRP+RAM;10012; DAT;20271;
«Странно» повела себя система на «мощных норвежских изделиях» (это где внешняя антенна и есть усилитель») — канал очень неустойчив: соединение наблюдалось только при касании рукой хотя бы одной из антенн. Поэтому полетела «кособокая система»: на земле антенна «помощнее», в ракете — маленькая «фигулька» nRF с нарисованной антенной.
23 марта 2019 года. Хорошая солнечная (с легкими облаками) суббота. Снег мягкий — проваливается под ногами… Полет состоялся около 14 часов после пятого старта РП-18.
 |
 |
 |
Видеозапись полета:
Перед самым стартом в небе низко пролетела пара военных вертолетов, а после старта — маленький «Робинсон» (непонятно, чего это они вдруг…).
Из-за обилия всякой электроники, подготовка к пуску прошла суетливо: то Bluetooth не хотел коннектиться, то телефон с камерой выключился.  Тем не менее, старт прошел хорошо, ракета спокойно поднялась, зависла, стала падать.
Тем не менее, старт прошел хорошо, ракета спокойно поднялась, зависла, стала падать.
 |
 |
Сработала система спасения и на парашюте РП-17Б опустилась недалеко от старта.
 |
 |
Приема — не было. Сигнал появился, когда я прошел в направлении падения метров пять. Ракета лежала примерно в 50-ти метрах от точки старта. Все нормально: пищалка работает, передатчик — тоже.
 |
 |
 |
Анализ данных ПОЛЕТА.
Вот тут «облом» — ошибка в программе из-за замены типа переменной с int на unsigned int! Корректными данные оказались только на этапе подъема.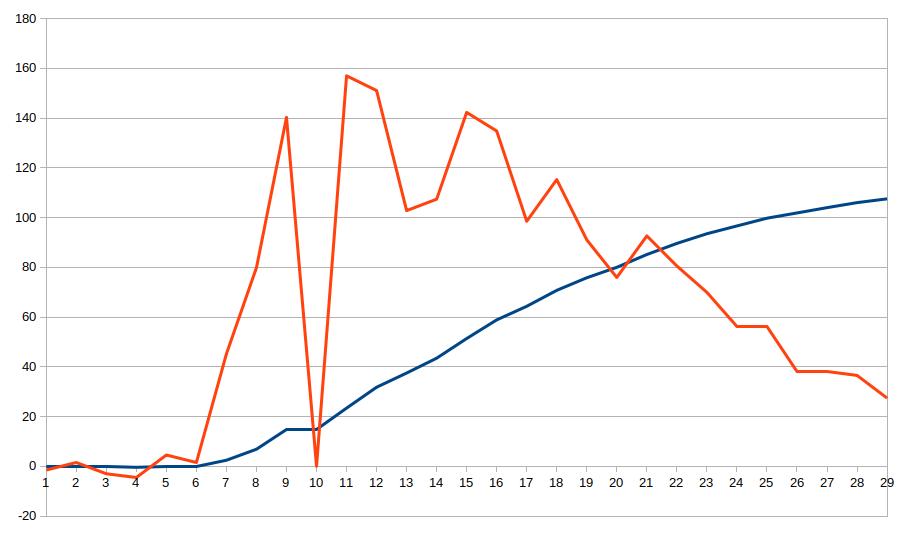
А вот данные принятые по радиоканалу оказались верными, причем они перестали поступать только когда ракета оказалась под снегом… И дальность — вполне приличная (109 метров вверх).
Итог: высота 109 метров, скорость 160 км/час. При начальной массе РП-17Б около 600 грамм.