
Второй тестовый запуск новой РП-32 был сделан для проверки работы «электроники».
Параметры двигателя и ракеты РП-32 во втором запуске.
Двигатель (безсопловик, такой же как в первом пуске, но без вышибного)
Длина трубы 175 мм
Длина канала 143 мм
Диаметр по топливу 20 мм
Диаметр канала 6 мм
Масса двигателя (ПП труба 25 мм, заглушка ПП, карамельное топливо) 122 грамма
Масса топлива (карамель) 85 грамм
 |
 |
 |
 |
 |
 |
Безсопловик делал обычным способом. На фото — он перед выниманием каналообразующего стержня. Рядом головная часть (150 мм длиной).

Ракета РП-32 (второй запуск)
Диаметр корпуса 50 мм
Длина корпуса 875 мм (включая 150 мм головная часть)
Масса снаряженная 728 грамм (+139 грамм к первому запуску)
Положение центра тяжести 528 мм от носа (-32 мм к первому пуску)
Центр давления 630 мм от носа
Запас устойчивости 2,0D
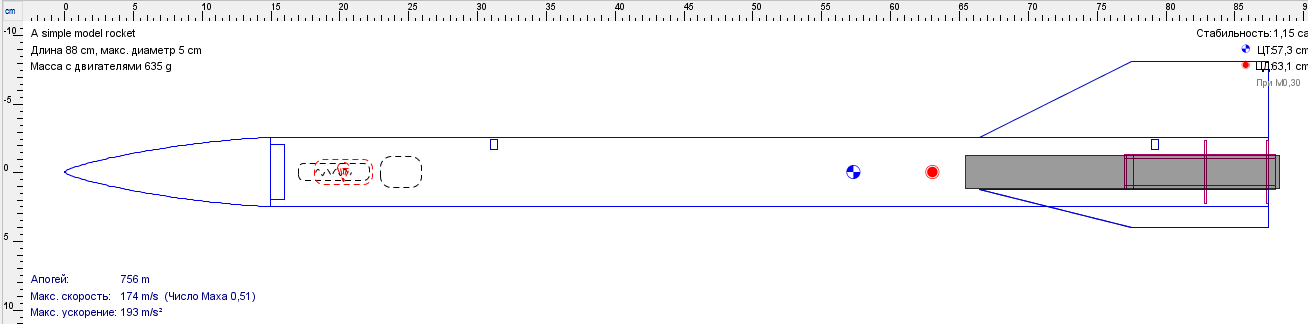
OpenRocket дает такую картинку
Отличие запуска от первого старта в наличии электроники на борту. В данном случае использовал блок от РП-30, но с обновленным программным обеспечением (v612).

В задачи контроллера входили функции: обнаружения старта, регистрации давления в EEPROM, управление ССР, передача телеметрии (в т.ч. координат) через передатчик LoRa.
11 мая 2022 года. Довольно ветреный, не слишком теплый день. Постоянно с неба что-то капает. Ушел в поле подальше — решил пускать, т.к. дальше погоду обещали еще хуже…
Перед запуском сделал фото напечатанной «головы». Снизу — отвинчивающаяся крышка. В полость головной части можно положить (например) альтиметр — для этого сделал отверстия.

Двигатель не выдающийся. Предполагался невысокий полет. На фото видно склеенный поврежденный в первом запуске стабилизатор.

Общий вид стартовой установки.

Видеозапись второго запуска РП-32
Все прошло довольно гладко. Для «поджигания» запала использовал литиевый аккумулятор от ноутбука (ребята выбросили — «не держит», но «на раз» его вполне должно было хватить). Это два плоских элемента по 5000 мА*час, соединенных последовательно. Раздулись — пришлось проколоть. Напряжение питания запала снизилось с 12 до 8 вольт, но в тестовом включении нить запала накалялась достаточно сильно. Из-за «низкой напруги» топливо поджигалось довольно долго — по видео около 7 секунд!
Ракета пошла вверх, слегка наклонилась в сторону ветра. Сильная облачность дает плохое изображение в качестве фона, но глазами полет было видно хорошо. После апогея ракета повернула к земле и (казалось) довольно долго не выпускала парашют — стал готовиться к сбору обломков. Но ССР сработала (уже на приличной скорости) — на видео постарался этот момент приблизить и замедлить.
После раскрытия парашюта ветром ракету слегка снесло. Было видно вращение ракеты на длинном фале. Боялся, что встреча с землей будет плачевной для стабилизаторов. Но, обошлось — ракета упала без внешних повреждений не слишком далеко от старта. На фото видно белый парашют на траве.

А на стартовой площадке — дымок уносит ветром…

Определение координат не понадобилось. Ракету было хорошо видно на земле. Несколько фото на месте приземления.
 |
 |
 |
 |
Не удалось отключить передатчик прямо на месте приземления. Принес ракету на место старта и разобрал.

Блок электроники (корпус) был разломан в нескольких местах и держался только на проводах. Примечательно, что при этом продолжал работать и исправно посылать координаты.
 |
 |
Сигнал передатчика принимался на два приемника — специализированный от pinko и мой самодельный — на Arduino NANO и смартфоне (их видно на фото).
После включения бортового питания, ракета с периодичностью 5 секунд передает пакет данных (координаты, состояние, питание, номер пакета, высота). После получения стабильных координат (используется модуль GPS HT1818, последовательное наличие минимум пяти отсчетов), ракета переходит в режим определения старта (снижение давления, соответствующее примерно пяти метрам подъема). В таком состоянии (на приемнике его видно) можно давать команду на запуск.
На этапе подъема ракета выдает соответствующее состояние. Был получен всего один отсчет в таком статусе. После обнаружения снижения, статус состояния меняется (получено 2 (на др. приемнике три) отсчета). По завершении заполнения памяти статус также меняется.
68;56°11.2637’N;040°44.7204’E;128;6;NNW;-88;8.2;3.53;13;3067;12:32:03
69;56°11.2637’N;040°44.7204’E;128;6;NNW;-111;2.0;3.53;13;3068;12:32:08
70;56°11.2631’N;040°44.7200’E;139;5;NW;-103;7.5;3.54;13;5069;12:32:13
71;56°11.2480’N;040°44.6917’E;239;40;SW;-103;7.7;3.51;13;6070;12:32:18
72;56°11.2343’N;040°44.6817’E;184;65;SW;-106;6.2;3.53;13;6071;12:32:23
73;56°11.2335’N;040°44.6934’E;123;59;SSW;-121;0.0;3.54;13;6077;12:32:53
74;00°00.0002’N;001°90.4986’E;9999;77807;SW;-121;0.0;3.54;13;6078;14:32:56
75;00°56.0002’N;001°90.4986’E;9999;111667;SW;-121;0.0;3.54;13;6079;14:33:01
76;56°13.3371’N;001°90.4986’E;9999;47598;WNW;-120;0.0;3.54;13;8080;14:33:06
77;56°11.2337’N;000°27.2826’E;9999;18108;WNW;-121;0.0;3.54;13;8081;14:33:11
78;56°11.2337’N;040°44.0006’E;0;751;W;-120;0.0;3.53;13;8082;00:33:16
79;56°11.2336’N;040°44.6939’E;124;59;SSW;-121;0.0;3.54;13;8089;12:33:53
Выше представлен «весь полет» РП-32:
- 68-69: «обнаружение старта». Питание 3,53В, довольно слабый уровень сигнала. Стабильные координаты.
- 70: «взлет». Высота всего 10 метров.
- 71-72: «спуск». Всего два отсчета 116 и 61 метр высоты.
- 73-75: «ракета лежит на земле, но память регистратора еще не заполнена»
- 76 и далее: «память заполнена, регистрации нет»
Видно, что когда ракета лежит на земле — очень слабый сигнал. К тому же отмечается «потеря спутников» (74-77) — видимо удар о землю и разрушение корпуса электроники сказались.
Данные
В приемнике, бывшем чуть выше, чем в траве на земле данных GPS побольше. На стадии спуска есть дополнительная точка. Общая картинка полета (дискрет 5 сек) такая:
Одна точка на подъеме, остальные — уже на спуске. Ну и мой пеший путь от финиша к точке старта…
График высоты по данным контроллера 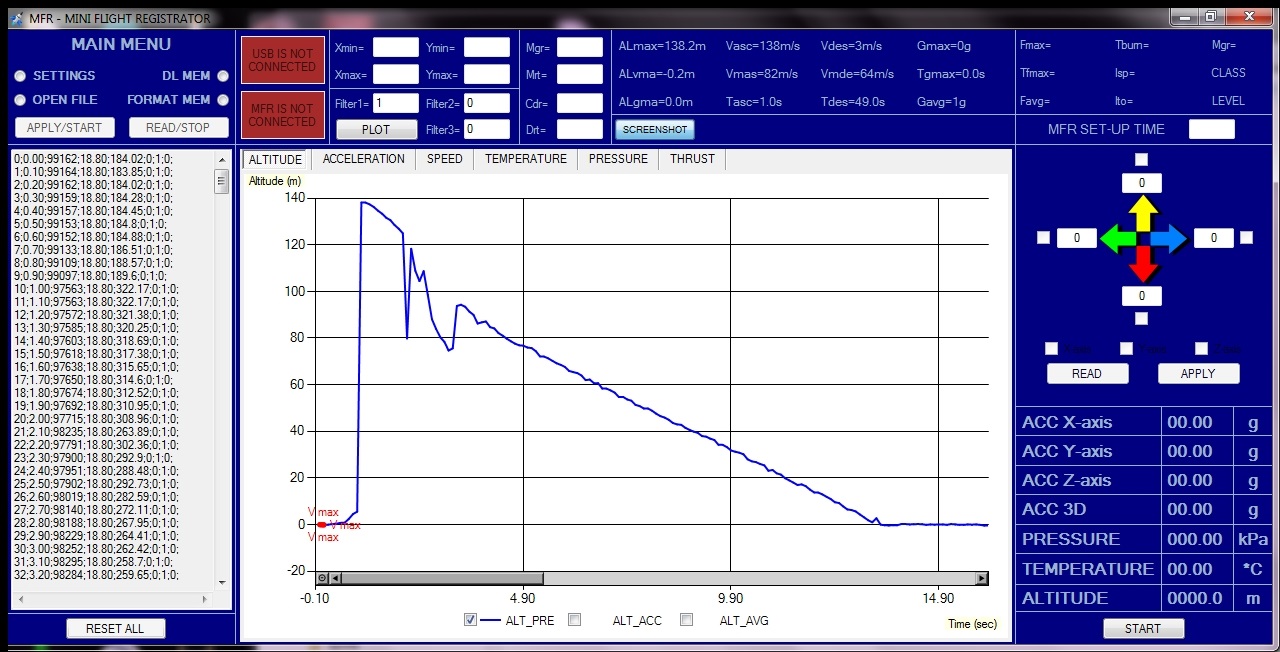
Тут хорошо видно программную ошибку — данные на этапе подъема (после обнаружения старта до срабатывания ССР) отсутствуют. Забыл инкремент адреса EEPROM прописать — все писалось в одну ячейку (исправлено в v613).
График изменения скорости (с соответствующей коррекцией на участке подъема):
Тут, пожалуй, только скорость спуска (чуть меньше 10 м/с) имеет значение…
Файлы
- Данные телеметрии с Redmi gps2map
- Данные из EEPROM контроллера rp32-2data
- Программа контроллера (v612) [есть ошибка] ProBmpGPS_E19SC_HT1818_v612