Как было сказано ранее, второй и третий старты РП-17 имели цель сверить показания высоты, выдаваемые GPS (обычный смартфон в качестве трекера) и барографа (датчик давления ВМР280 и Arduino Pro mini в качестве регистратора).
Места в головной части ракеты полно — туда Arduino с аккумулятором от старенького «сименса» и положил.
Двигатель во третьем старте был еще более мощным, чем в первом и втором стартах (длина канала безсопловика увеличена до 150 мм). В остальном ракета осталась прежней. Масса увеличилась до 630 грамм.
8 декабря 2018 года. Тот же день, Уже после обеда (после второго старта РП-17), в 15:00 состоялся третий пуск РП-17. День все такой же пригожий (без ветра, даже солнце проглядывается). Даже зритель был (охотник возвращался с неудачного поиска зайцев).
 |
 |
Видеозапись полета
Как все проходило.
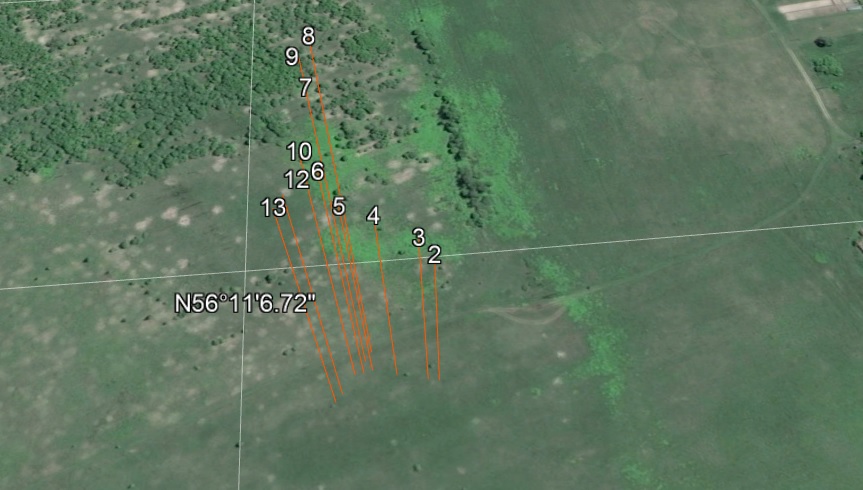
Старт заметно резвее за счет более мощного мотора. Очень хорошо ракета пошла вверх. Сработали петарды вышибного заряда, раскрылся парашют, ракета плавно опустилась. Довольно зрелищно и не напрягает с поиском. Но, для контроля, послал СМС с запросом — ракета ответила: координаты совпали до третьего знака…
На месте падения обнаружил только парашют. Все остальное зарылось в снег (но СМС-ка была получена и отправлена даже из-под снега).
 |
 |
 |
 |
Анализ данных
Вот в третьем старте данных было по-больше
Данные о высоте и скорости с датчика давления
отсчеты идут с дискретом 0,2 сек.
Все почти нормально, рано только парашют раскрылся — можно было еще метров 30 набрать.
«Трекер» дал несколько отсчетов, ниже совмещенный график показаний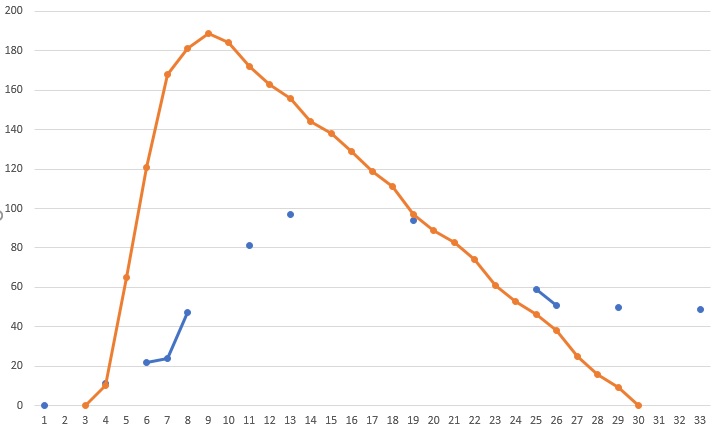
Вот тут-то и видно работу фильтра трекера (синий). Сильное отставание данных по высоте от реальных (высота по барометру — коричневый). В результате этого нет реальных данных о высоте (занижены вдвое — для данного полета). Последние точки — ракета уже на земле, а высота еще на 40 м выше…