
Наконец-то удалось кое-как отладить новое ПО для РП-17Б. Теперь на ракете используется модуль GPS и координаты «сбрасываются на Землю» в реальном времени…
В очередном старте использован тот же двигатель БПДП20-150, что летал в предыдущем случае. Коротко: пластиковая труба диаметром 25 мм, длиной 160 мм. Сорбито-калиево-селитровая карамель, канал длиной 150 мм и диаметром 7 мм. Масса топлива 78 грамм. Масса двигателя «в сборе» (с пластиковой надставкой до общей длины 210 мм) 109 грамм. На фото — он слева.
Внешне, ракета не претерпела изменений, в головной части «полетела» камера SQ8 (на сей раз без «зеркальца под 45 градусов» — съемка было «просто вбок»).
Блок электроники был существенно доработан. Добавился модуль GPS Neo-6M для получения координат и высоты полета и отдельная микросхема для записи сведений о полете 24C64. Подробнее блок описан тут. Все сведения сразу же после получения отправляются по радиоканалу (nRF24L01) «на Землю».
Пример одной посылки, выведенной на экран смартфона:
N;11565; EEP;4728; TIME;12262950; LANT;5ХХ1.592; LONG;4ХХ5.488; SOS;111; LATD;1146; NU;0; PRES;100986;
(тут как раз видна ошибка в отображении долей минут координат: в данном случае должно быть 5ХХ1.0592 и 4ХХ5.0488)
Алгоритм программы переработан — теперь период измерений определяется модулем GPS и в этом полете составляет 0,5 сек.
Общая масса ракеты составила 640 грамм. Расчетная тяга двигателя — около 5 кг, расчетная высота — до 250 метров.
13 апреля 2019 года. Не удалось провести пуск в День Космонавтики (как это сделал Илон Маск со своей Falcon Heavy — была пятница! День — по погоде: «так себе». Ощутимый ветерок, облачность.
Видеозапись полета:
Как все проходило: электроники прибавилось — пришлось всю ее запускать (потом кое-что еще и перезапускать), если коротко, то… сначала установил направляющую и саму ракету, потом проверил «запал» двигателя.
 |
 |
 |
Затем установил камеру общей записи, затем включил бортовую камеру. Потом запустил ретранслятор, проверил связь по bluetooth со смартфоном регистрации.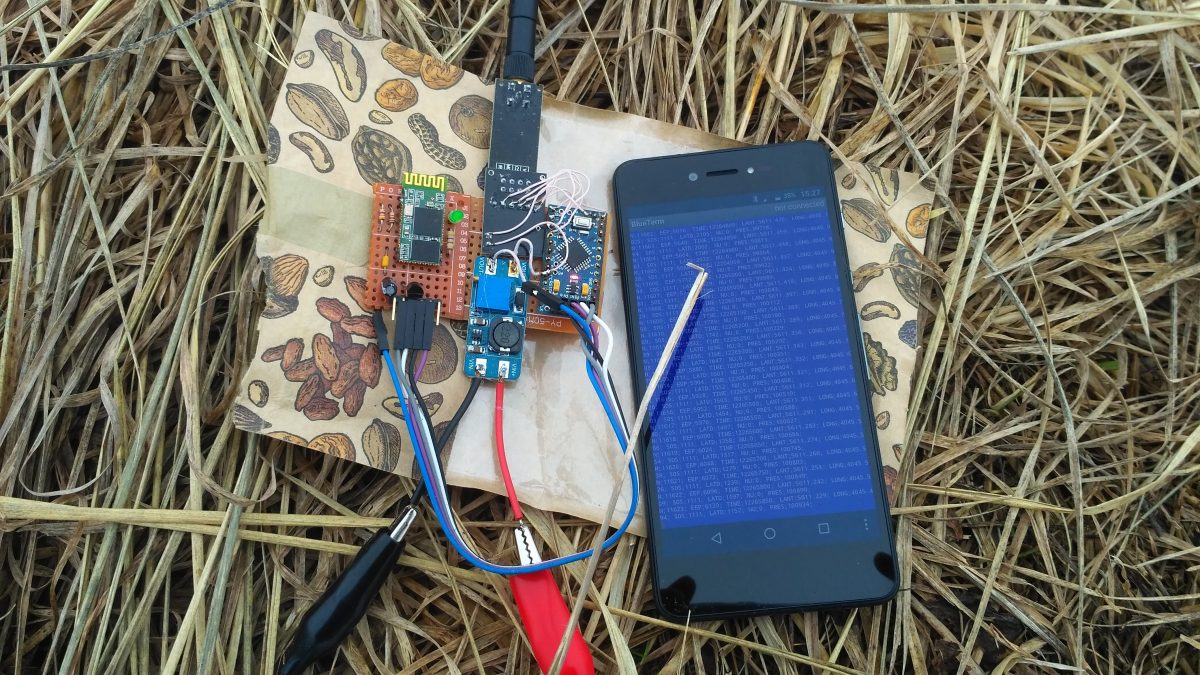 Включил электронику на ракете — стал ждать обнаружения спутников, потом 30 сек — предстартовый отсчет и фото в это время.
Включил электронику на ракете — стал ждать обнаружения спутников, потом 30 сек — предстартовый отсчет и фото в это время.
После отсчета — запуск. Ракета пошла хорошо, довольно резво (не успел камерой за ней). Взлет пошел практически вертикально. До облаков ракета не добралась, так что «разворот» ее к земле было хорошо видно (только не на видео). На спуске сработала система спасения и ракета «весело болтаясь и крутясь» под куполом парашюта упала совсем недалеко от старта.
Взлет пошел практически вертикально. До облаков ракета не добралась, так что «разворот» ее к земле было хорошо видно (только не на видео). На спуске сработала система спасения и ракета «весело болтаясь и крутясь» под куполом парашюта упала совсем недалеко от старта.
Далее, собственно, была проверка поиска по данным GPS. Красный парашют было видно на земле с точки старта, но… проверил прием данных на регистрирующем смартфоне — данные с ракеты поступали до самой поверхности. Ввел последние координаты в Google Maps и… получил точку падения совсем не там, где ожидал — в 500 метрах — за соседней деревней. Взял другой смартфон, перепроверил ввод координат (поигрался с минутами, сотыми и секундами) — никак не выходит на истинную точку падения — облом!
Забрал ракету — с ней все в порядке: пищит, данные по радио продолжает передавать, ничего не поломалось.
Разбор результатов. По данным, полученным по радиоканалу: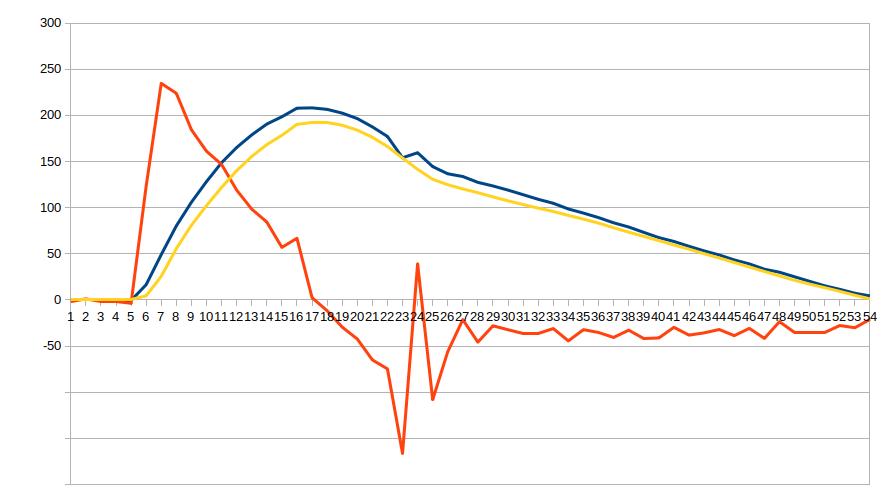
Синим — высота по данным датчика давления, желтым — по данным GPS, красным — скорость по данным о высоте с датчика давления. Все данные хорошо коррелируются. Один отсчет выпал (излом скорости на подъеме).
По данным из микросхемы памяти на ракете — результаты такие (все совпадает, как и должно быть):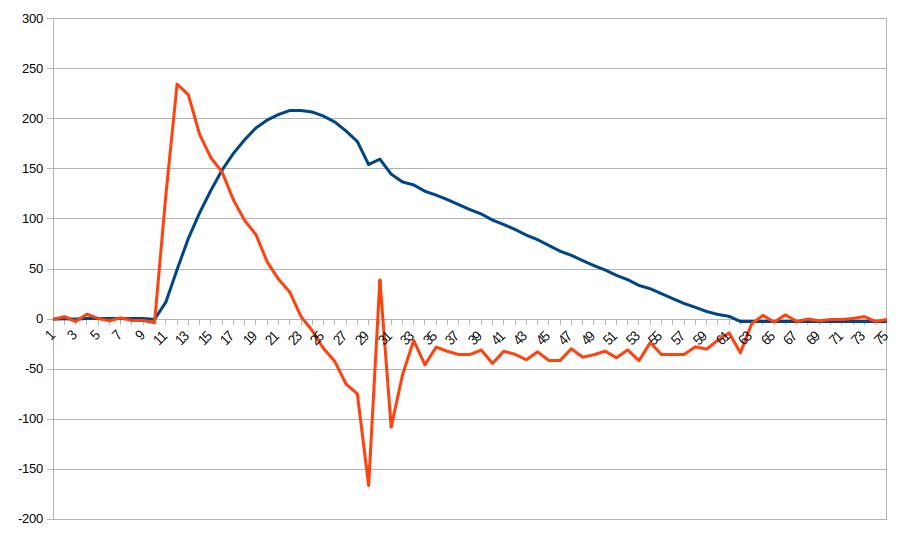
После обработки координат (нашел ошибку в процедуре их вывода на экран — пропущены незначащие нули в долях минут) в Google Earth получена картинка полета.
и с другого ракурса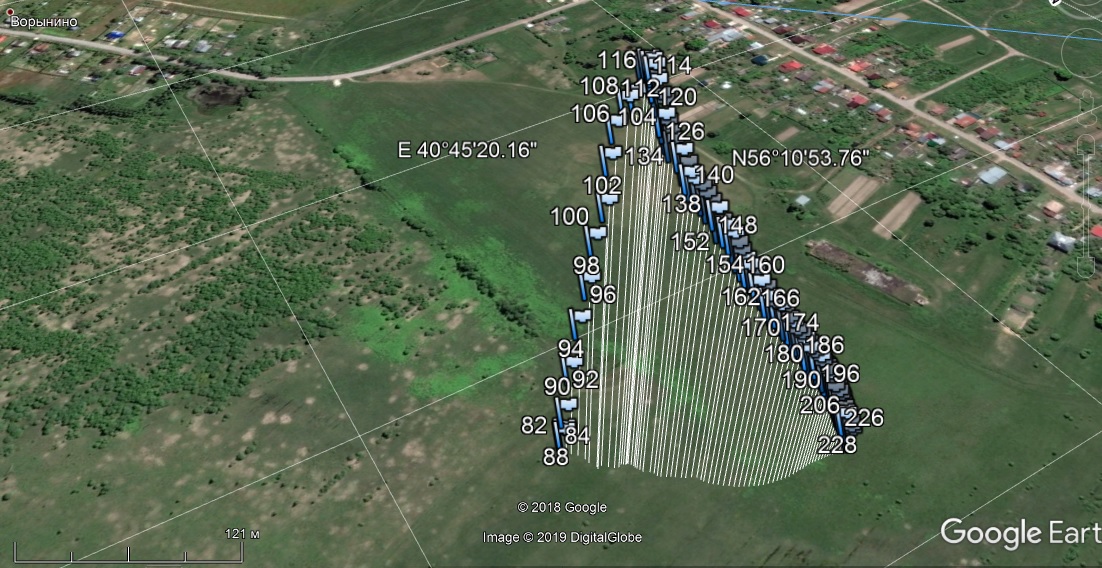
Вывод: все работает «как надо». Надо «подчистить» ПО и запускать ракету повыше!