Пару слов надо сказать о модернизированной электронной начинке РП-17Б. Модернизация пошла с семнадцатого старта…
В дополнение к датчику давления установлен GPS модуль на базе Neo-6M, добавлена энергонезависимая память 24C64, а для передачи сведений оставлен 2,4ГГц передатчик на nRF24L01+.
Схема «электроники» ракеты ниже:
Питание осуществляется от литиевого аккумулятора GB1 типоразмера 18650. Управление — Arduino Pro mini (на момент создания в загашнике были только на ATmega168 — пришлось «впихиваться» в нее); пониженное напряжение питания (примерно 3,8В) не сказалось на стабильности работы. Модуль датчика давления BMP280 (DD2) запаян прямо на контактах Arduino — поэтому такая «странная» схема подключения. 24С64 (DD3) подключена обычным образом по I2C. Передатчик NRF24L01 подключен стандартно через аппаратный SPI. Модуль GPS подключается к разъему программирования Arduino. Управление «электропетардой» Н1 — транзисторное.
Алгоритм управления «привязан» к данным, поступающим с модуля GPS. В начале проверяется напряжение питания. Если оно больше 4В, то работает процедура вывода содержимого 24С64 по UART в компьютер. Если меньше, то работает программа регистрации. Проверяется исправность «Электропетарды» (по уровню напряжения на А2), далее проверяется датчик давления. Если все нормально, то в цикле анализируются поступающие с модуля GPS данные. При обнаружении спутников с паузой в 30 секунд начинается регистрация данных.
В память 24С64 записывается информация с модуля GPS (время, координаты, высота); датчика давления. По радиоканалу отправляется все тоже плюс адрес текущей ячейки памяти и порядковый номер посылки.
Сигнал на срабатывание Н1 формируется на основании данных о давлении (спуск (повышение давление) примерно на 5 метров за три отсчета).
Т.к. у nRF24 свой протокол передачи, пришлось «на Земле» делать «ретранслятор» в «нормальный» Bluetooth для приема данных на смартфон/планшет/ноутбук.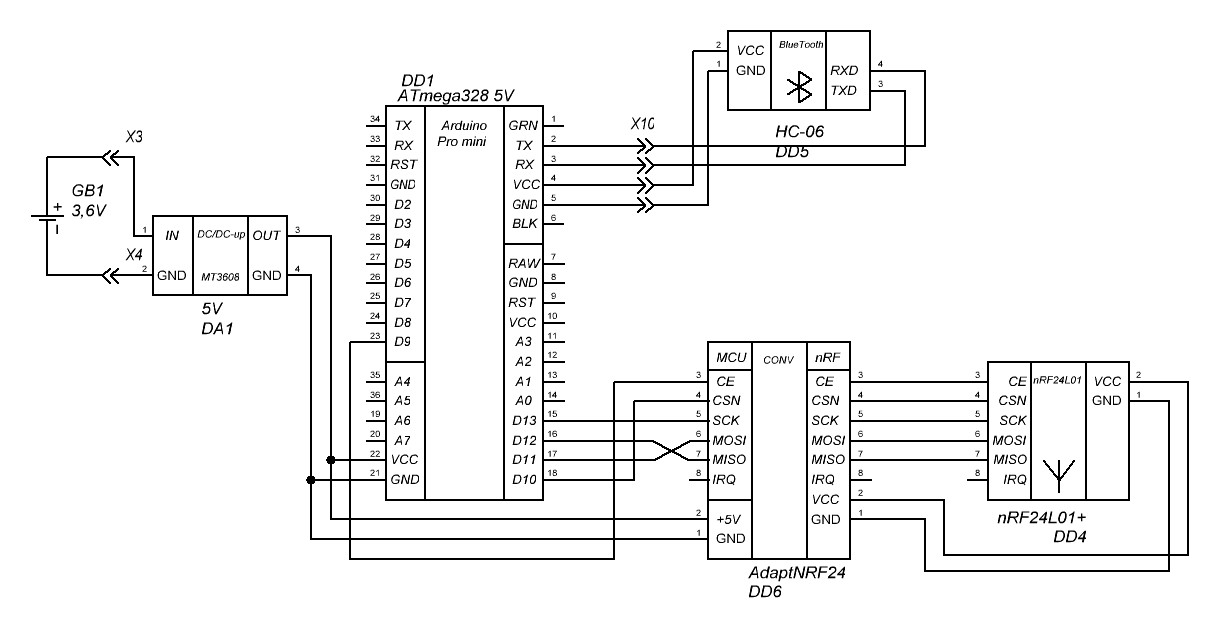
Тут все сделано «классически»: питание поднимаем до «нормальных» 5 В. «Типовая» Arduino Pro mini (328 5V), адаптер для подключения nRF24L01. Bluetooth — на НС-06 через UART с требуемым согласованием уровней и напряжения питания.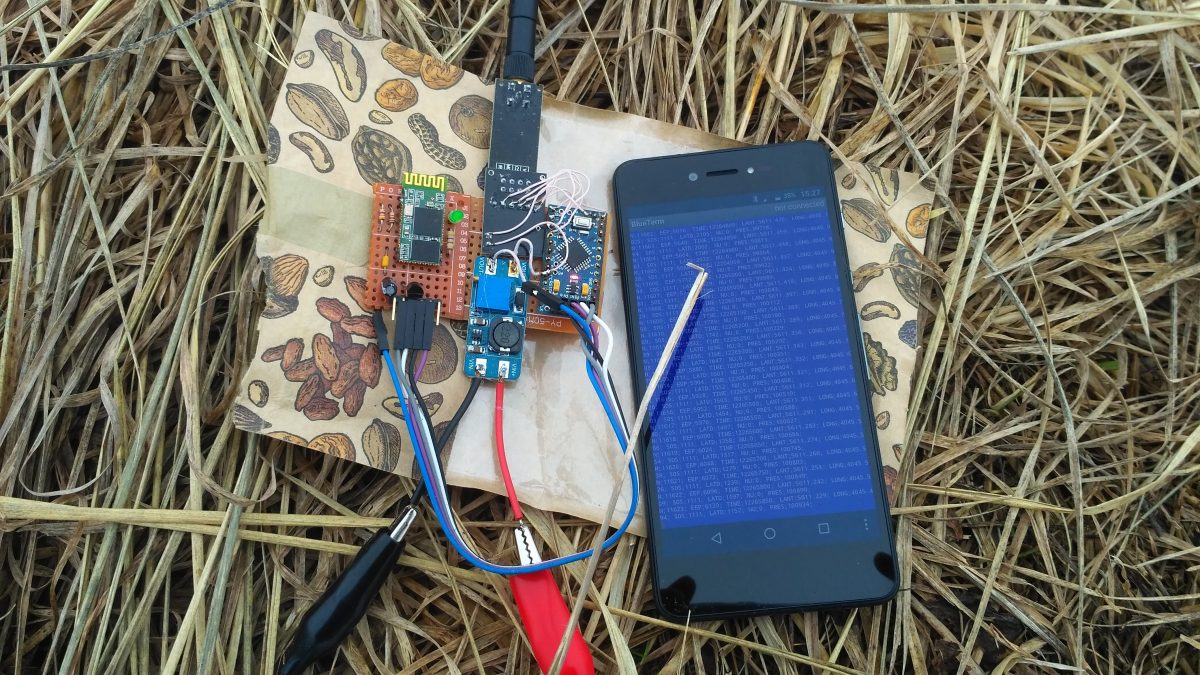
Принимаемый сигнал (массив из двенадцати двухбайтовых целых чисел) преобразуется в «читабельный» текст и выводится в UART.
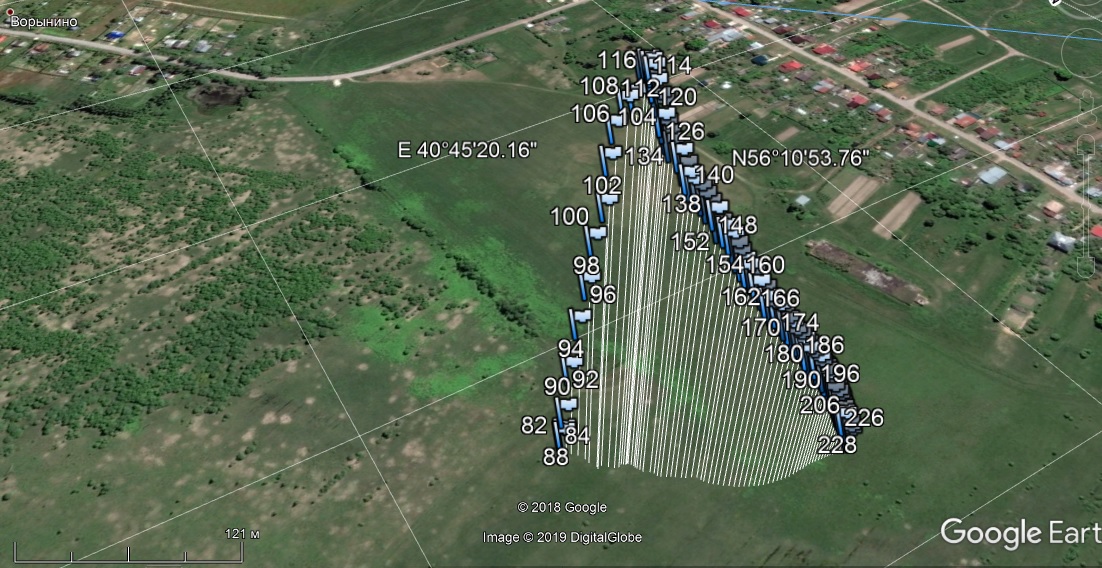
Полеты за 200 метров показали стабильный прием. После этого (хотя надо было бы сделать это «ДО») провел «наземные» замеры дальности связи.
Пара nRF24L01+ (обычный маленький на ракете) — такой же, но с усилителем и «нормальной» антенной (на Земле): показала стабильный прием до 500 метров и с «выпадаемыми» посылками — до 700 метров. Далее 700 — можно считать, что приема нет, хотя отдельные посылки принимаются.
В этом «эксперименте» ракета располагалась на высоте 1 метр. Ретранслятор нес в сумке (примерно 0,5 м от земли). Положение антенны не учитывалось (сумка болталась при движении «как попало»), хотя субъективно: если антенна nRF «ближе» к источнику сигнала, чем модуль Bluetooth — сигнал стабильнее.
ИТОГ: будем запускать ракету выше!