
Седьмой старт чуть не закончился провалом (потерей ракеты)…
Цель запуска — очередная проверка (сверка) показаний высоты, выдаваемых GPS и датчиком давления.
Модуль GPS — обычный «старенький» Neo-6M; датчик давления — «бошевский» ВМР280. Датчики опрашиваются микроконтроллером на Arduino Pro mini. Данные без обработки пишутся в EEPROM 24С64 (текстовые строки NMEA с модуля GPS) и во внутреннюю EEPROM ATMega168 (данные о давлении). Периодичность выбрана «небыстрой» — 2 раза в секунду (определяется поступающими с Neo-6M данными).
 |
 |
 |
Из трех, подготовленных к праздникам двигателей — остался неиспользованным самый «большой»: безсопловый с длиной канала 145 мм (диаметр по топливу 20 мм). Система спасения привязана к работе двигателя: по окончании работы — взрывается петарда, ракета «разбирается», парашют — раскрывается. Примерная задержка — 8-10 сек.
 |
 |
 |
При массе ракеты 500-600 грамм, высота полета ожидалась в районе 200 — 250 метров.
5 января 2019 года. 10:20 утра. Снег не шел всю ночь и сейчас не идет… Пасмурно, довольно сильная и низкая облачность, ветра нет (легкий северный). (Через полтора часа погода станет идеальной: на 30 минут прояснится, выйдет яркое солнце — но кто ж знал…)
 |
 |
 |
Видеозапись запуска:
Замедленная запись старта с «ближней» камеры SQ8
Итак, что происходило: старт прошел отлично, ракета резво ушла за облака.
 |
 |
 |
Кадры ухода со старта
 |
 |
 |
 |
Попытки визуально обнаружить спускающуюся ракету оказались неудачными (на видеозаписи видно «метание» камеры в поисках ракеты).
Момента раскрытия парашюта видно не было (довольно низкая облачность). Звук разрыва петард был хорошо слышен…
…разобрал стартовую установку, отнес все домой. Настроился на длительные поиски, включил трекер и… пошел «прочесывать» поле в предполагаемой зоне падения… Как ни странно, нашел красный парашют довольно скоро (даже измучиться в глубоком снегу как следует не успел)…
 |
 |
 |
Ракета была примерно в 200-х метрах от места старта (в соответствии с направлением легкого ветерка).
 |
 |
 |
Все цело и даже через два часа после старта звук пищалки слышно…
Интересно посмотреть результаты полета по данным регистраторов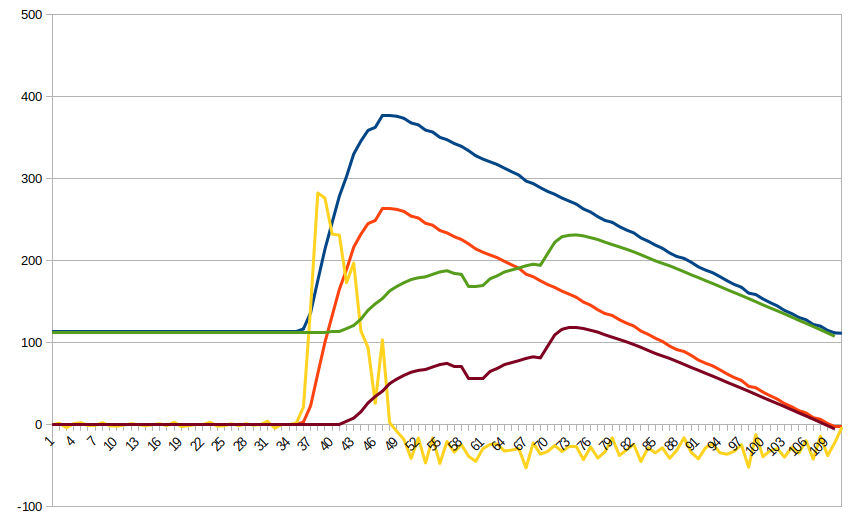
Здесь стоит обратить внимание на красную (синюю) и коричневую (зеленую) кривые. Красная — это значение высоты по данным датчика давления ВМР280. Коричневая — это данные о высоте по данным GPS (приведенные к нулю — убрана абсолютная (зеленый) высота места над уровнем моря). Видно запоздание данных по данным GPS и непонятный провал в середине. Такая форма говорит о наличии фильтра по данным о высоте в творении u-blox. Перед стартом ракеты модуль Neo-6M программировался под динамическую модель Airborne <4g, однако данные слабо отличаются от полученных в пятом старте РП-17, где стоял режим «по умолчанию» = Portable (голубая кривая).
Забегая вперед, скажу, что при программировании Neo-6M перед восьмым стартом, u-center выдала режим модуля Portable. Так что, данные, полученные в седьмом старте стоит подвергнуть сомнению.
Технические результаты полета: высота 270 метров, максимальная скорость при подъеме 290 км/час.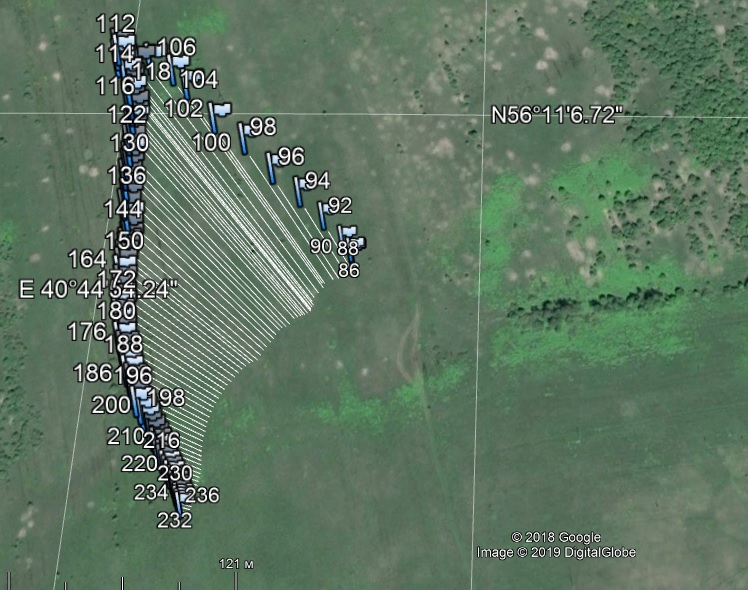
Для контроля, привожу график высоты с добавленными показаниями изменения координат.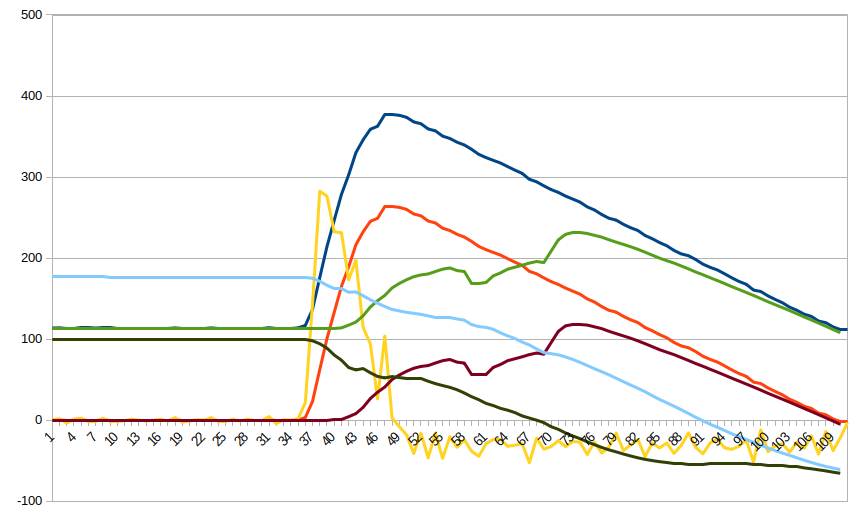
это голубая и темно-зеленая кривые (конечно, масштабированные). График показывает, что по координатам в модуле стоит своя фильтрация и изменения начались сразу же с начала подъема ракеты (а высота при этом сильно (аж на 3 сек!) запаздывает).
В восьмом старте еще раз буду проверять динамическую модель Airborne <4g (надо бы еще «покруче», но это крайний режим в Neo-6M).